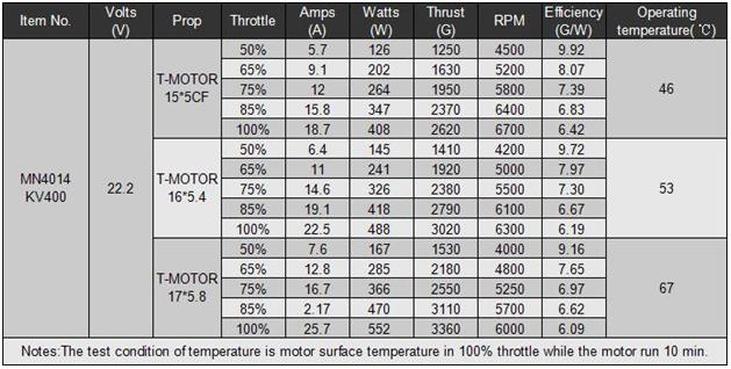
Below is the Tiger Motor chart for the popular MN4014400kv motor:
The first column of interest to us is volts. This is the supply voltage, in this case 22.2V or a 6 cell pack. The second column tells us what size and pitch propeller was used for the test. The next column is throttle expressed as a percentage of the maximum available RPM. Following throttle is amperage, or the current draw of the motor. This number is important for properly sizing ESCs and selecting batteries with the correct C rating. Next we have watts, which is simply a measure of the power that the motor is outputting. Watts can be calculated using Ohm’s law. The formula for this is W = VI. W=watts, V=voltage, and I=current or amperage. Now we get to what we are really looking for, thrust! This is measured in grams of thrust and is simply how much force the motor and prop combo can push or pull. The next column is RPMs, or how fast the prop/motor spins. Up next is grams per watt or the efficiency of the motor/prop combo. This is a measure of how many watts it takes to make a gram of thrust. The higher this number is, the more efficient the setup is. Finally we have temperature. This represents the temperature of the motor after 10 minutes of running at 100% throttle.
So if we were to take a SkyJib x4 Octo with a hypothetical all up weight of 7 kg, let’s see how this motor would do. If we look at the 15 inch prop data, we can see that this motor develops 1250 grams of thrust at 50% throttle. Multiplied by 8 motors that gives us 10 kg of thrust at 50% throttle, or more than enough to hover. We like to have a bit of overhead on our motors, so lets see what the same situation looks like with 2 motors out. With 6 motors, we still make 7.5 kg of thrust at 50% throttle. This motor is suitable for our purposes and provides a large amount of redundancy since one or two motors failing will not cause a crash, provided the flight controller
does its job.